Résumé
Note de la rédaction
Rapport qualité-prix : intéressant si tu sais ce que tu achètes
Design et prise en main : compact mais un peu brut
Matériaux et finition : ça fait bricolage, mais ça tient
Durabilité et fiabilité dans le temps
Performance et IA : ça fait le job, mais faut rester raisonnable
Présentation : ce que propose vraiment la WonderCam
Efficacité sur des projets concrets
Points Forts
- Fonctions IA intégrées (suivi de ligne, visage, objets) utilisables sans gros développement
- Écran 2 pouces pratique pour le debug et l’aspect pédagogique
- Compatible avec plusieurs plateformes (micro:bit, Arduino, ESP32, Raspberry Pi) via I2C
Points Faibles
- Reconnaissance sensible aux conditions de lumière et pas assez fiable pour un usage critique
- Documentation et interface un peu brouillon, marque peu connue avec peu de ressources en ligne
Caractéristiques
Voir la fiche produit complète →| Marque | SAANICH |
Une petite caméra IA pour s'amuser avec les robots
J'ai pris cette WonderCam parce que je cherchais un module de vision pas trop cher pour bricoler avec un Raspberry Pi et un ESP32. Sur le papier, ça vend du rêve : IA embarquée, suivi de ligne, reconnaissance de visage, compatible micro:bit, Arduino, Raspberry Pi, ESP32… bref, le petit module magique pour donner des yeux à un robot. En réalité, c'est un peu moins simple que ça, mais ça reste un jouet intéressant si tu aimes bidouiller.
Je l’ai utilisée surtout sur une petite voiture robot et branchée en I2C sur un ESP32, puis en USB sur un Raspberry Pi pour voir ce qu’elle avait dans le ventre. Le truc qui m’a intrigué dès le début, c’est cette histoire de « formation en 1 clic » et les modèles MobileNet déjà intégrés. Je voulais voir si un débutant pouvait vraiment s’en sortir sans passer par des tutos de 40 minutes sur YouTube.
Globalement, on est sur un produit orienté éducation / makers, pas sur une caméra pour faire de la vraie vision industrielle ou un projet pro. Faut être clair : ça reste une petite carte avec un K210, un écran 2 pouces et quelques fonctions IA pré-mâchées. Si tu t’attends à la même chose qu’une vraie caméra OpenCV branchée sur un PC costaud, tu vas être déçu. Si tu veux plutôt un truc autonome qui fait du suivi de ligne et de la détection d’objets basique, ça commence à devenir intéressant.
Dans ce test, je vais surtout parler de ce que j’ai réussi à faire concrètement : suivi de ligne sur robot, détection d’objets simples, reconnaissance de visage très basique, et intégration avec Arduino / ESP32. Je ne vais pas te sortir du blabla marketing : je vais dire où ça marche, où ça galère, et si ça vaut le coup de mettre des sous dedans par rapport à d’autres solutions genre Raspberry Pi Camera + un peu de code Python.
Rapport qualité-prix : intéressant si tu sais ce que tu achètes
Niveau rapport qualité-prix, ça dépend clairement de ton usage. Si tu compares à une simple caméra pour Raspberry Pi à 10–15 €, la WonderCam paraît chère. Mais il faut garder en tête que tu payes aussi le processeur K210, les modèles IA embarqués, l’écran et toute la couche logicielle autour (menu, modes pré-configurés, training en 1 clic). Pour quelqu’un qui débute en IA embarquée et qui veut des résultats visibles rapidement, ça peut valoir le coup de payer un peu plus pour éviter des heures de config logicielle.
Par rapport à d’autres modules de vision IA type HuskyLens ou similaires, la WonderCam se place dans la même idée : une caméra « intelligente » qui fait une partie du boulot toute seule. Là où elle est un peu moins forte, c’est sur la documentation et la finition globale. On sent que la marque n’est pas très connue, la doc est parfois floue, et il y a moins de tutos / retours utilisateurs en ligne. Ça joue clairement sur la valeur du produit, parce que tu perds du temps à chercher des infos.
Si tu es du genre à aimer bidouiller, à ne pas avoir peur de lire de la doc en anglais et de tester des trucs, la WonderCam reste un bon petit jouet pour explorer la vision IA sans exploser le budget. Tu peux faire pas mal de choses sans PC puissant, juste avec un microcontrôleur à côté. Si par contre tu cherches un truc bien cadré, avec une grosse communauté, des exemples de code partout et un support solide, je pense qu’il vaut mieux viser une solution plus connue, quitte à payer un peu plus.
Perso, je trouve que pour un club robotique, un fablab ou un prof qui veut montrer concrètement ce que c’est que l’IA embarquée, le produit a du sens. Pour un bricoleur solo qui veut un système de vision fiable pour un projet sérieux, je serais plus réservé. En gros : rien d’extraordinaire mais efficace pour apprendre et expérimenter, à condition de ne pas surestimer ce que ça peut faire.
Design et prise en main : compact mais un peu brut
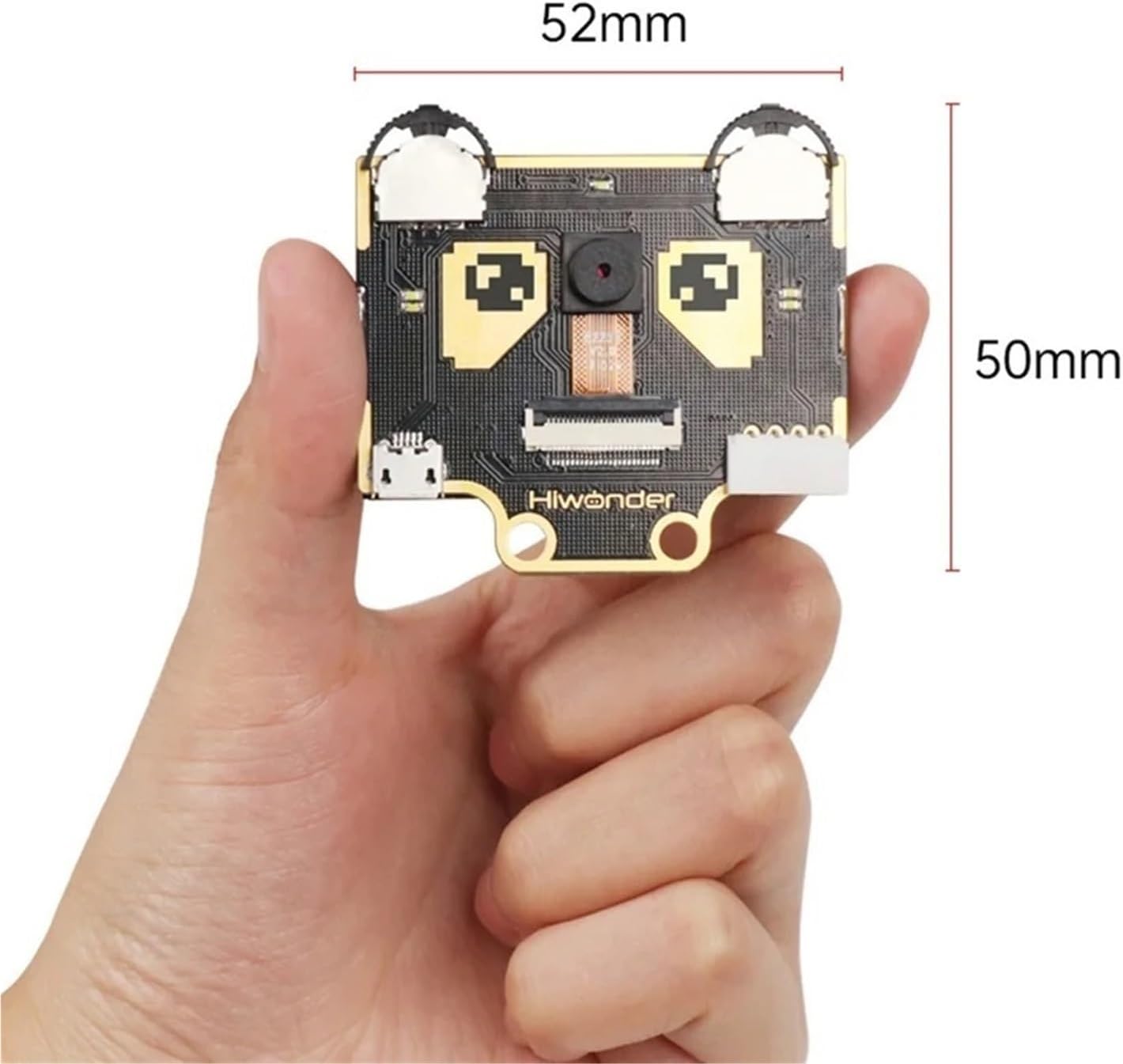
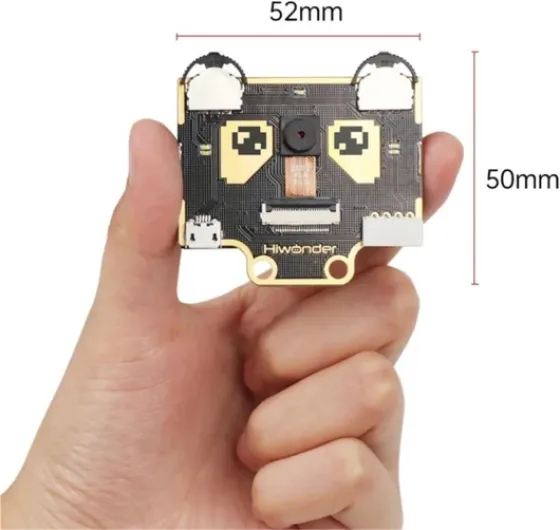
Niveau design, on est sur quelque chose de très fonctionnel. La carte est assez compacte, dans les 10 x 10 mm annoncés dans la fiche (en pratique c’est évidemment un peu plus grand que ça une fois montée, mais ça reste petit). Tu as la caméra d’un côté, l’écran 2 pouces de l’autre, quelques boutons pour naviguer dans les menus, et les connecteurs pour l’alimentation et la communication. Ce n’est pas joli au sens « produit fini », c’est clairement une carte pour makers à intégrer dans un projet, pas un gadget à poser sur un bureau.
Ce que j’ai bien aimé, c’est que l’écran intégré permet de voir directement ce que la caméra détecte : les cadres autour des visages, les boîtes de détection d’objets, la ligne suivie, etc. Pour debugger, c’est très pratique. Tu n’as pas besoin de brancher un écran externe ou de loguer des données pour comprendre ce qui se passe. Pour expliquer la vision IA à quelqu’un qui débute, ça aide beaucoup : on voit en temps réel quand le modèle se plante ou quand la lumière pose problème.
Par contre, les boutons sont petits et pas super agréables. Au bout de quelques jours à naviguer dans le menu, tu sens que ce n’est pas pensé pour une utilisation intensive. Les inscriptions / icônes ne sont pas toujours très claires, et la logique des menus demande un temps d’adaptation. On n’est pas dans une interface « friendly » comme sur un smartphone, c’est plutôt un menu d’appareil technique un peu daté. Rien de dramatique, mais faut le savoir.
Au niveau intégration mécanique sur un robot, ça va, mais il n’y a pas 50 options de fixation. Le boîtier en acrylique est basique, tu peux le visser sur une plaque ou une base de robot, mais si tu veux quelque chose de propre, tu risques de sortir l’imprimante 3D. J’aurais bien aimé quelques trous de fixation mieux placés ou un support plus standard. Pour un projet éducatif, ça passe, mais pour un montage un peu propre, il faut bricoler.
Matériaux et finition : ça fait bricolage, mais ça tient
La fiche parle d’un matériau acrylique, et c’est bien ce qu’on retrouve pour le petit boîtier / support autour de la carte. L’acrylique, ce n’est pas le truc le plus costaud du monde, mais pour un module de ce type, ça suffit. La carte en elle-même est une PCB classique, avec la caméra, l’écran et le processeur K210 soudés. On n’est pas sur une finition haut de gamme, mais rien ne m’a choqué : pas de soudures qui bavent, pas de composant qui se balade.
Après deux semaines à la démonter, la remonter sur un châssis de robot, la poser sur la table, la rebrancher sur différentes cartes, je n’ai pas vu de jeu ou de fissure. L’écran est bien fixé, la nappe de la caméra n’a pas bougé. Par contre, il faut éviter de trop tordre le module, l’acrylique n’aime pas les contraintes. Clairement, ce n’est pas une caméra faite pour subir des chutes répétées ou être manipulée par des enfants de 6 ans sans surveillance.
Le ressenti global, c’est « kit de makers ». Ça ne donne pas l’impression d’un produit fini comme ceux de grandes marques, mais ça ne fait pas cheap au point de faire peur. Pour le prix auquel je l’ai vue, ça me paraît cohérent. On sent que l’argent est surtout parti dans la puce K210 et le développement logiciel, pas dans un boîtier en métal ou une finition premium. Pour un usage en labo, en club robotique ou à la maison, ça suffit largement.
Un point à noter : il n’y a pas vraiment de protection sérieuse pour la lentille de la caméra. Si tu transportes souvent ton robot dans un sac à dos avec d’autres trucs, prévois au minimum un petit capuchon ou un montage qui évite que la lentille frotte partout. Sinon, tu vas vite avoir des micro-rayures et une image moins nette. Ce n’est pas dramatique, mais c’est le genre de détail auquel le fabricant n’a pas trop pensé.

Durabilité et fiabilité dans le temps
Sur la durabilité, je n’ai évidemment pas un recul de plusieurs années, mais après quelques semaines d’utilisation un peu intensive, je peux quand même donner un avis. La carte a été branchée / débranchée un paquet de fois, j’ai changé de contrôleur (Arduino, ESP32, puis Raspberry Pi), je l’ai montée sur un châssis de robot, démontée, reposée sur le bureau, etc. Pour l’instant, aucun souci matériel : pas de faux contact visible, pas de plantage lié à un mouvement ou à une mauvaise connexion.
L’écran 2 pouces tient bien le coup, pas de pixel mort ni de scintillement. Les boutons répondent toujours, même si on sent qu’ils ne sont pas faits pour être martyrisés pendant des années. Le boîtier en acrylique ne s’est pas fissuré chez moi, mais clairement, si tu laisses ça entre les mains d’enfants très jeunes ou si tu trimballes ton robot dans un sac sans protection, je ne parierais pas sur une longévité incroyable. C’est plus fait pour un environnement un minimum soigneux : bureau, labo, salle de classe.
Côté fiabilité logicielle, j’ai eu quelques plantages ponctuels : la caméra qui freeze, besoin de redémarrer, ou un mode IA qui ne se lance pas du premier coup. Ce n’est pas constant, mais ça arrive. Rien de bloquant, mais ça montre que le firmware n’est pas parfait. Pour un usage éducatif ou de prototypage, ce n’est pas dramatique : tu redémarres et tu continues. Pour un système qui doit tourner en continu sans surveillance, je serais plus prudent.
En résumé, la WonderCam me paraît suffisante pour un usage normal de maker / éducateur : tu la protèges un minimum, tu évites les chocs inutiles, et tu acceptes qu’il faudra parfois la rebooter. Ce n’est pas un tank, mais ce n’est pas non plus un gadget qui casse au premier coup. Pour le prix et le positionnement, ça reste cohérent, à condition de ne pas la traiter comme un jouet ultra robuste.
Performance et IA : ça fait le job, mais faut rester raisonnable
Côté performance, la WonderCam s’en sort plutôt correctement pour ce qu’elle est. Le processeur Kendryte K210 permet de faire tourner des modèles type MobileNet en embarqué, donc la caméra peut détecter certains objets, suivre une ligne, reconnaître un visage, sans avoir besoin de calculer sur un PC ou un Raspberry Pi. En pratique, le framerate est acceptable : on n’est pas à 60 fps, mais pour piloter un robot ou faire des démos, c’est largement suffisant.
Sur le suivi de ligne, j’ai été agréablement surpris. J’ai monté la WonderCam sur une petite voiture robot, et avec un ruban noir sur fond blanc, le suivi est plutôt stable. Elle renvoie bien la position de la ligne, et le robot arrive à tourner au bon moment. Ça demande un peu de réglages (contraste, hauteur de la caméra, etc.), mais une fois que c’est fait, ça tourne correctement. Tant que l’éclairage est correct, ça tient la route. Dès que la lumière devient très variable, on sent que l’algorithme commence à hésiter.
La reconnaissance faciale, par contre, reste très basique. Elle détecte un visage dans le champ, affiche un cadre, et tu peux lui apprendre un visage pour dire « reconnu / pas reconnu ». Ça marche à peu près si tu es bien en face, à une distance raisonnable, et avec une lumière correcte. Dès que tu bouges un peu trop vite ou que la lumière est moyenne, ça rate souvent. Pour une démo en classe ou pour déclencher une action simple (ouvrir une porte de robot quand un visage connu apparaît), ça va. Pour de la vraie sécurité ou un usage sérieux, oublie.
Pour la classification d’objets avec les modèles MobileNet, c’est un peu la loterie. Sur certains objets bien distincts, ça marche pas mal, mais il ne faut pas s’attendre à une précision de malade. La fonction « training en 1 clic » est sympa : tu montres un objet, tu valides, et elle apprend. Mais si les objets sont trop proches visuellement ou si la lumière change, elle se plante vite. Ça reste pédagogique : tu peux montrer à quelqu’un ce qu’est un modèle entraîné, ce qu’est un dataset limité, etc. Pour un projet qui doit être fiable à 95 %, ce n’est pas suffisant.

Présentation : ce que propose vraiment la WonderCam
Concrètement, la WonderCam, c’est un petit module de vision IA basé sur un processeur Kendryte K210, avec un écran IPS de 2 pouces (320x240), une caméra, et un connecteur type I2C pour parler avec des cartes comme micro:bit, Arduino, ESP32, Raspberry Pi, etc. Elle arrive déjà avec plusieurs fonctions intégrées : suivi de ligne, reconnaissance de visage, détection d’objets via des modèles MobileNet, et une fonction de « training en 1 clic » pour apprendre de nouveaux objets directement depuis la caméra.
Le but, c’est que la caméra fasse elle-même le gros du boulot IA, et qu’ensuite elle envoie juste des infos simples à ton contrôleur, du style : « objet A détecté », « ligne à gauche », « visage reconnu », etc. Ça évite de charger ton microcontrôleur avec des calculs lourds. Sur ce point-là, l’idée est plutôt bonne : tu peux garder un petit Arduino ou un micro:bit pour piloter les moteurs, pendant que la WonderCam gère la vision.
En utilisation, tu navigues dans un menu sur le petit écran pour choisir le mode : suivi de ligne, reconnaissance faciale, classification d’objets, etc. Tu peux aussi lancer l’apprentissage d’un nouvel objet en le montrant à la caméra et en validant. C’est assez ludique, surtout si tu bosses avec des ados ou des débutants qui veulent voir un résultat visuel rapidement. Par contre, la doc n’est pas toujours très claire, surtout en français. On sent que c’est traduit un peu à l’arrache, du coup j’ai dû tâtonner pour comprendre certains réglages.
Par rapport à d’autres solutions que j’ai testées, genre un simple module caméra + traitement sur Raspberry Pi, la WonderCam est plus autonome mais aussi plus limitée. Tu es un peu enfermé dans les modes prévus par le fabricant, sauf si tu prends le temps de fouiller la partie SDK / code bas niveau, ce qui n’est pas mis très en avant. Donc si tu veux du plug-and-play pour faire du suivi de ligne ou de la détection d’objets simple, ça fait le job. Si tu veux un truc hyper personnalisable, il faudra un peu plus s’arracher et accepter de lire de la doc en anglais / chinois.
Efficacité sur des projets concrets
Je l’ai surtout testée sur trois types de projets : robot suiveur de ligne, petit robot suiveur d’objet, et détection de visage pour déclencher une action. Sur le robot suiveur de ligne, honnêtement, ça fait bien le job. Une fois les paramètres réglés, le robot suit le tracé sans trop zigzaguer. J’ai comparé avec un simple capteur infrarouge de suivi de ligne, et la WonderCam est plus flexible : tu peux changer la couleur de la ligne, gérer des intersections plus complexes, etc. Par contre, c’est plus cher et plus lourd à configurer pour un simple parcours basique.
Pour le suivi d’objet, j’ai essayé de lui faire suivre une balle colorée. Là, c’est un peu plus mitigé. Tant que la balle est bien visible et qu’il n’y a pas trop d’objets autour, ça suit à peu près. Dès que le fond est chargé ou que la lumière change, l’algorithme décroche. Ce n’est pas inutilisable, mais ce n’est pas ultra stable. Pour un projet de démo, ça va. Pour un robot qui doit vraiment suivre quelqu’un dans un couloir sans se tromper, c’est trop limite.
Sur la détection de visage pour déclencher une action (par exemple, allumer une LED ou faire bouger un servo quand un visage connu est détecté), ça fonctionne, mais il faut accepter un certain taux de faux négatifs. Parfois, elle ne reconnaît pas le visage alors que c’est la même personne, juste parce que l’angle ou la lumière a un peu changé. Pour du fun ou de l’éducation, ce n’est pas gênant. Pour un système qui doit être fiable, ce n’est pas assez robuste.
En résumé, en termes d’efficacité, je dirais que la WonderCam est franchement pas mal pour l’éducation et le prototypage, mais il ne faut pas lui demander des miracles. Elle permet de monter vite des projets qui « en jettent » visuellement (un robot qui suit une ligne, qui détecte un visage, etc.), sans se plonger dans du code IA compliqué. Mais si tu cherches une solution de vision solide pour un projet sérieux, il vaut mieux partir sur une caméra classique + traitement sur un Raspberry Pi ou un PC, même si c’est plus long à mettre en place.
Points Forts
- Fonctions IA intégrées (suivi de ligne, visage, objets) utilisables sans gros développement
- Écran 2 pouces pratique pour le debug et l’aspect pédagogique
- Compatible avec plusieurs plateformes (micro:bit, Arduino, ESP32, Raspberry Pi) via I2C
Points Faibles
- Reconnaissance sensible aux conditions de lumière et pas assez fiable pour un usage critique
- Documentation et interface un peu brouillon, marque peu connue avec peu de ressources en ligne
Conclusion
Note de la rédaction
Au final, la WonderCam, c’est une petite caméra de vision IA qui fait plutôt bien ce pour quoi elle est pensée : permettre à des bricoleurs et des débutants de jouer avec la vision artificielle sans se plonger dans du code complexe. Le suivi de ligne est exploitable, la détection de visage et la classification d’objets sont correctes pour de la démo, et l’écran intégré est vraiment pratique pour comprendre ce que fait l’algorithme en temps réel. Le gros intérêt, c’est de pouvoir brancher ça sur un micro:bit, un Arduino, un ESP32 ou un Raspberry Pi et d’avoir déjà des fonctions IA prêtes à l’emploi.
Par contre, il faut être lucide : ce n’est pas une solution de vision ultra fiable pour un projet sérieux. La reconnaissance est sensible à la lumière, la doc est moyenne, l’interface est un peu rugueuse, et la marque n’a pas une grosse communauté derrière. Si tu veux un truc plug-and-play avec plein de tutos et un support solide, tu trouveras mieux ailleurs, souvent un peu plus cher. Pour moi, ce produit s’adresse surtout à : des profs, des clubs robotique, des makers qui aiment bidouiller et qui veulent montrer concrètement ce qu’est l’IA embarquée. Ceux qui cherchent une caméra pour un système de sécurité, un robot autonome « sérieux » ou un produit fini devraient passer leur chemin et partir sur une solution plus robuste.